Recursive
Reconstruction of Sparse Signal Sequences (or Sequential Compressed Sensing)
Faculty: Namrata
Vaswani
Students: Wei Lu
and Chenlu Qiu Supported by: NSF
(CCF)
Goal: Reconstruct time
sequences of spatially
sparse/compressible signals (with unknown and time-varying sparsity
patterns) from a
limited number of linear “incoherent” measurements, in real-time (i.e.
causally and recurisvely). Use the fact that the sparsity pattern
evolves slowly over time [see this figure
for empirical verification]
Main Ideas and Applications 1. LS-CS-residual
(LS-CS): Compressive Sensing
on Least Squares Residual
We consider the problem of recursively and causally
reconstructing time sequences of sparse signals (with unknown and
time-varying sparsity patterns) from a limited number of noisy linear
measurements. The sparsity pattern is assumed to change slowly with
time. The idea of our proposed solution, LSCS- residual (LS-CS), is to
replace compressed sensing (CS) on the observation by CS on the least
squares (LS) residual computed using the previous estimate of the
support. We bound the CSresidual error and show that when the number of
available measurements is small, the bound is much smaller than that on
CS error if the sparsity pattern changes slowly enough. We also obtain
conditions for “stability” of LS-CS over time for a signal model that
allows support additions and removals every-so-often, and that allows
coefficients to gradually increase (decrease) until they reach a
constant value (become zero). By “stability”, we mean that the number
of misses from the support estimate and the number of extras in it
remain bounded by time-invariant values (in turn implying a
time-invariant bound on LS-CS error). The concept is meaningful only if
the bounds are small compared to the support size. Extensive simulation
results backing our claims are shown. Contributions
(i) The LS-CS-residual idea and extensive simulations
(ii) Bound for CS-residual error and comparison with simple CS
error bound
(iii) Proof of stability (over time) of support errors and hence of
reconstruction errors, under mild assumptions
2. Modified-CS:
Modifying Compressive Sensing for Problems with Partially Known Support
We study the problem of reconstructing a sparse signal from a limited
number of its linear projections when a part of its support is known,
although the known part may contain some errors. The “known” part of
the support, denoted T, may be available from prior knowledge.
Alternatively, in a problem of recursively reconstructing time
sequences of sparse spatial signals,
one may use the support estimate from the previous time instant as the
“known” part. The idea of our proposed solution (modified-CS) is to
solve a convex relaxation of the following problem: find the signal
that satisfies the data constraint and whose support contains the
smallest number of new additions to T, although it may or may not
contain all elements of T. We obtain sufficient conditions for exact
reconstruction using modified-CS. These are much weaker than those
needed for compressive sensing (CS) when the sizes of the unknown part
of the support and of errors in the known part are small compared to
the support size. Simulation comparisons for both sparse and
compressible signals are shown. Contributions
(i) The modified-CS idea, extensive simulations and
proof-of-concept applications in MRI/video
(ii) Proof of exact reconstruction under much weaker assumptions
on the measurement matix than those needed for simple CS (means: need
much fewer measurements)
(iii) Regularized modified-CS idea (use the prior knowledge of signal
values along with support knowledge)
3. KF-CS-residual
(KF-CS): Compressive
Sensing on Kalman filtering Residual We consider the problem of reconstructing time sequences of
spatially sparse signals (with unknown and timevarying sparsity
patterns) from a limited number of linear “incoherent” measurements, in
real-time. The signals are sparse in some transform domain referred to
as the sparsity basis and the sparsity pattern is assumed to change
slowly with time. The main idea of our proposed solution is to replace
compressed sensing (CS) on the observation by CS on the Kalman filtered
(KF), observation residual computed using the
previous estimate of the support. We also obtain the conditions
under which KF-CS-residual (KF-CS) estimate eventually converges to
that of
the genie-aided KF (the KF that knows the support at each time). A
useful corollary is that if the sparsity pattern changes slowly enough,
the KF-CS estimate stabilizes to within a small error of the
genie-aided KF estimate. An analogous result is also obtained for LS
CS-residual. Contributions
(i) The KF-CS idea and extensive simulations.
(ii) Proof of KF-CSerror stability over time, but under strong
assumptions. Ongoing work includes trying to do this under assumptions
similar to those for LS-CS
3. Ongoing work:
(a) Bounding regularized-modified-BPDN error and comparison with
modified-BPDN, LS-CS and simple CS (submitted)
(b) Stability (over time) of modified-CS-noisy and LS-CS-residual when
support additions/removals at every time (submitted)
(c) Applications in dynamic MRI and video: Chenlu Qiu's pageWei Lu's page
(d) Stability of KF-CS and regularized-modified-CS over time, under
assumptions similar to those for LS-CS: still working
4. Applications:
Already existing work for dynamic MR image reconstruction
(greatly reduced capture time by using CS already demonstrated by
others),
But in all existing work: reconstruction is done offline (wait
to get all the measurements first) and it takes
many hours. Our goal: reduce scan time (because of CS) and
reconstruction time (because of causal reconstruction)
Our goal: Reduce the number of measurements required (reduce
scan time) and provide real-time (causal and recursive
reconstruction) with same complexity as CS for one frame
Application: Provide ability to use MR in interventional
radiology
applications and in real-time fMRI imaging
Works because support of wavelet
transform of medical image sequences changes slowly over time
[see figure]
Single-pixel video camera:
Convert the single-pixel camera into a single-pixel video camera with
real-time display capability (ability to reconstruct the image in
real-time from projections)
Sensor networks:
Real-time estimation of time-varying temperature, pressure or other
random fields using a sensor network : extend Haupt-Nowak's work to
time sequences
Any CS problem where need to reconstruct a "sequence of signals",
most typically a time sequence, that satisfies "slow sparsity change"
assumption
MATLAB Code:
Modified-CS code:
Code using CVX (works for signals/images of size upto about
4096:
README.txt with
detailed comments and instructions
Two older versions of KF-CS code
Kalman filtered CS (KF-CS): KFCS_new.zip
(Main file:
runsims_final, see comments and see README.txt)
Please cite N. Vaswani, ICASSP'09 and ICIP'08 if you use this
code.
See README.txt for code structure. runsims_final.m is the
main
file. kfcs_full contains the kfcs code.
Least Squares CS (LS-CS):
Replace the KF in the above code by LS: to get the LS-CS implementation
(will be posted soon)
Older version of code based on the ICIP'08 paper: KFCS.zip
(To run it: runsims2, followed by plotting the errors)
Please cite the above ICIP paper when using this code
See README.txt or comments in runsims2.m
You may need to install netlab and add it to your MATLAB path:netlab.zip
Simulation Results:
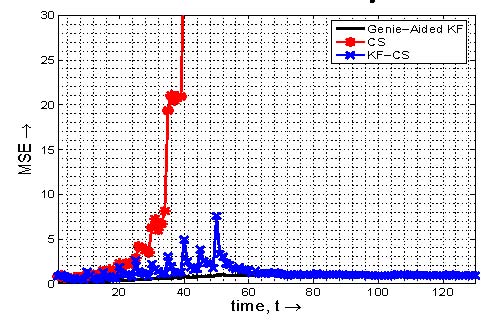
KF CS-residual (KF-CS): We used signal dimension, m = 256, and
observation dimension, n = 72 and simulated i.i.d. random-Gaussian
measurements. We started
with sparsity size, S_1 = 8 and for 10 ≤ t ≤ 50, we added 2 new
elements to the support every 5 time
units. Thus S_t = S_max = 26, for all t ≥ 50 (note 26 > n/3 = 24.
KF-CS with the deletion
(cofficient removal) step was implemented. Notice that the KF-CS error
converges to that of the Genie KF roughly by t = 65. On the other hand,
regular CS error is very large (particularly when S_t > n/3).
Maximum CS error was 425.
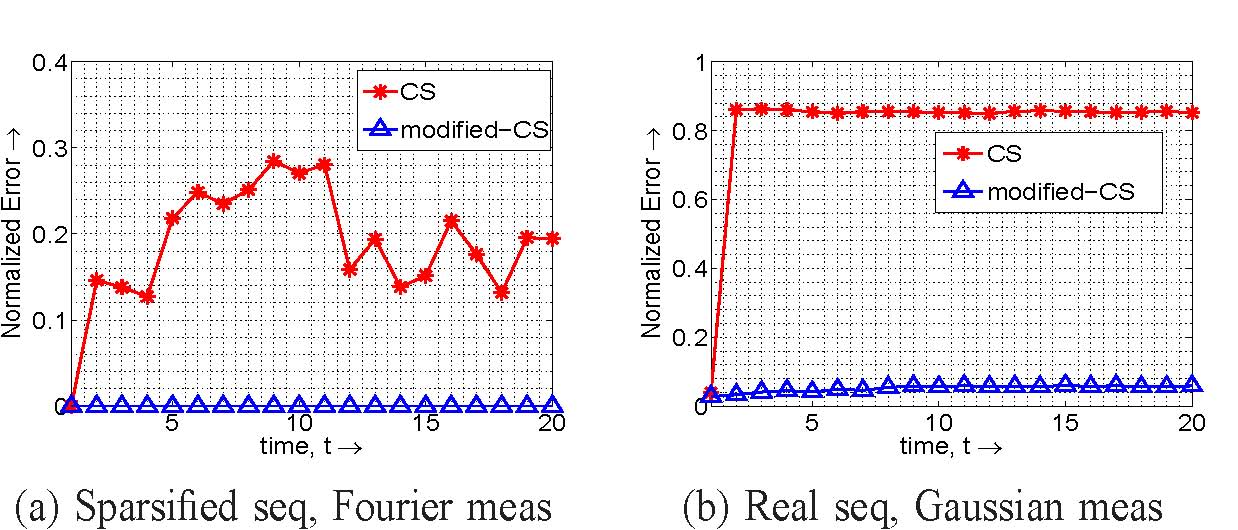
Modified-CS: We took a cardiac
image sequence, sparsified it in the wavelet domain by retaining the
largest wavelet coefficients corresponding to 99% of the image energy.
The support of the wavelet coefficients of the resulting image sequence
was about 10% of the image size. For noise-free
measurements, modified-CS achieved exact
reconstruction with only n=16% Fourier measurements
(simulate dynamic MRI application). With so few observations, clearly
CS failed. See Fig (a) below. Fig (b) below considers a real cardiac
sequence (not sparsified), but uses n=19% random Gaussian measurements
(simulate video compression application).
Students:
Graduate Students
Wei Lu : modified-CS for dynamic MRI and for video compression
Chenlu Qiu: Kalman filtered CS and Least Squared CS for
dynamic MRI
Undergraduate students:
Senior Design
team (Aaron Logan, William Lim, Dylan Reid, Kyungchul Song)