Autonomous Tool Use and Learning of Tool Affordances by Robots
Autonomous Tool Use and Learning of Tool Affordances by Robots
The ability to use tools is one of the hallmarks of intelligence.
Tool use is fundamental to human life and has been for at
least the last two million years. We use tools to extend our reach,
to amplify our physical strength, to transfer objects and
liquids, and to perform many other tasks. A large number of animals have
also been observed to use tools (Beck, 1980).
Some birds, for example, use twigs or
cactus pines to probe for larvae in crevices which they cannot reach
with their beaks. Sea otters use stones to open hard-shelled
mussels. Chimpanzees use stones to crack nuts open and sticks to reach
food, dig holes, or attack predators. Orangutans fish for termites
with twigs and grass blades. Horses and elephants use sticks to
scratch their bodies. These examples suggest that the ability to use
tools is an adaptation mechanism used by many organisms to overcome
the limitations imposed on them by their anatomy.
Despite the widespread use of tools in the animal world, however,
studies of autonomous robotic tool use are still rare. There are
industrial robots that use tools for tasks such as welding, cutting,
and painting, but these operations are carefully scripted by a human
programmer. Robot hardware capabilities, however, continue to increase
at a remarkable rate. Humanoid robots such as Honda's Asimo, Sony's
Qrio, and NASA's Robonaut feature motor capabilities similar to those
of humans. In the near future similar robots will be working side by
side with humans in homes, offices, hospitals, and in outer space. It
is difficult to imagine how these robots that will look like us, act
like us, and live in the same physical environment like us, will be
very useful if they are not capable of something so innate to human
culture as the ability to use tools. Because of their humanoid
"anatomy" these robots undoubtedly will have to use external objects
in a variety of tasks, for instance, to improve their reach or to
increase their physical strength. These important problems, however,
have not been well addressed by the robotics community.
Another motivation for studying robot tool behaviors is the hope that
robotics can play a major role in answering some of the fundamental
questions about tool-using abilities of animals and humans. After
ninety years of tool-using experiments with animals (Köhler, 1931)
there is still no comprehensive theory that attempts to explain the
origins, development, and learning of tool behaviors in living
organisms.
A simple object like a stick can be used in numerous tasks that are
quite different from one another. For example, a stick can be used to
strike, poke, prop, scratch, pry, dig, etc. It is still a mystery how
animals and humans learn the affordances (Gibson, 1979) of objects and what are the
cognitive structures that they use to represent them.
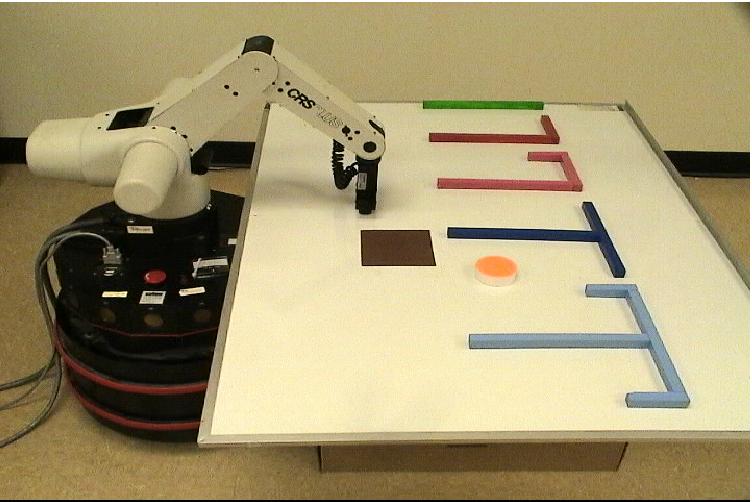
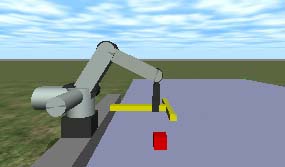
Experimental Platforms
 |
 |
| CRS+ A251 Mobile Manipulator |
Dynamics Simulator |
MPEG Movies from Robot Experiments
Extension of Reach
"Broken" Tool
MPEG Movies from the Simulator
Related Papers
- Stoytchev, A., "Behavior-Grounded Representation of Tool Affordances", In Proceedings of IEEE International Conference on Robotics and Automation (ICRA), Barcelona, Spain, April 18-22, 2005..
- Stoytchev, A., "Toward Learning the Binding Affordances of Objects: A Behavior-Grounded Approach", In proceedings of AAAI Symposium on Developmental Robotics, Stanford University, Mar 21-23, 2005.
- Stoytchev, A., "Toward a Behavior-Grounded Representation of Tool Affordances", To appear in Proceedings of the Fourth International Workshop on Epigenetic Robotics (EpiRob), Genoa, Italy, Aug. 25-27, 2004.
- Stoytchev, A., "Computational Model for an Extendable Robot Body Schema", College of Computing Technical Report GIT-CC-03-44, October 21, 2003.
- Stoytchev, A., "Development and Extension of the Robot Body Schema", In Proceedings of the Third International Workshop on Epigenetic Robotics (EpiRob), Boston, MA, Aug. 4-5, 2003.
Useful References
- Beck, B., "Animal Tool behavior: The use and manufacture of tools by animals", Garland STMP Press, NY, 1980.
- Köhler, W., "The mentality of apes", Harcourt, Brace, and Co, NY, 1931.
- Gibson, J. J., "The ecological approach to visual perception", Houghton Mifflin, Boston, 1979.

